

Jeff Yoshimi @jyoshimi@qoto.org
Philosopher, phenomenologist, and cognitive scientist at UCMerced. Visualization builder. Work on Simbrain (http://simbrain.net) in my free time.
Joined Dec 2022
Jeff Yoshimi
boosted

Finding suitable embeddings for connectomes (spatially embedded complex networks that map neural connections in the brain) is crucial for analyzing and understanding cognitive processes. Recent studies have found two-dimensional hyperbolic embeddings superior to Euclidean embeddings in modeling connectomes across species, especially human connectomes. However, those studies had limitations: geometries other than Euclidean, hyperbolic, or spherical were not considered. Following William Thurston's suggestion that the networks of neurons in the brain could be successfully represented in Solv geometry, we study the goodness-of-fit of the embeddings for 21 connectome networks (8 species). To this end, we suggest an embedding algorithm based on Simulating Annealing that allows us to embed connectomes to Euclidean, Spherical, Hyperbolic, Solv, Nil, and product geometries. Our algorithm tends to find better embeddings than the state-of-the-art, even in the hyperbolic case. Our findings suggest that while three-dimensional hyperbolic embeddings yield the best results in many cases, Solv embeddings perform reasonably well.
Full video: https://www.youtube.com/watch?v=GQKaKF_yOL4 arXiv: http://arxiv.org/abs/2407.16077
#NonEuclideanGeometry #connectome #RogueViz
Jeff Yoshimi
boosted

Jeff Yoshimi
boosted

I was today years old when I found out that it was pioneer sociologist of science Robert Merton (of Mertonian norms fame) who coined the term 'the Matthew effect'! He was inspired by sociologist Harriet Zuckerman, and later said she should have been listed as co-author of the paper 👇
https://www.science.org/doi/10.1126/science.159.3810.56
My book with @scotton
on Braitenberg Vehicles was published today 🥳. The result of thousands of backyard meetings and zoom calls, the book confirms what I'll call Braitenberg's dictum: even the simplest systems contain great wealths of complexity.
https://mitpress.mit.edu/9780262548199/the-open-dynamics-of-braitenberg-vehicles/
We really labored to work out all the bifurcations and dynamical regimes (though we did not get them all), and to explain them in as clear and visually rich a manner as possible. The book also contains an accessible but rigorous overview of dynamical systems theory.
The centerpiece of the book is the analysis of pairs of vehicles. Here is the central bifurcation diagram. The "cheese wheel" is a 3d subspace of the 4d weight space, and the panels correspond to ways the vehicles behave when the weights are in different regimes.
Meanders with arbitrarily many petals are possible in the rose-colored regions, which is one of the more beautiful results.
The systems can be used to describe animal behaviors, chemical reactions, themes in conservative and dissipative dynamics, and much more. Even with all that, the system contains further multitudes, and that's all just for a pair of simple agents! Braitenberg's dictum prevails.
There is also a discussion of the philosophical implications of the work (a pluralist approach to representations and embodied cognitive science), which I'll post about separately soon!
Jeff Yoshimi
boosted

That's just a placeholder while they find a less generic name, right?
Jeff Yoshimi
boosted

There's a new edition of Principia Mathematica out, and it's in the form of a searchable digital map that details the connections between its various parts.... https://dailynous.com/2024/06/19/a-searchable-digital-map-of-principia-mathematica/
Jeff Yoshimi
boosted

Last week I saw the Conway et al. book "The Symmetry of Things" for the first time. Its a beautiful book.
The book I coauthored, on a different topic, will be available this June. Its titled "The Open Dynamics of Braitenberg Vehicles". Something it has in common with "The Symmetry of Things" is that it is intended for readers with a wide variety of mathematical backgrounds. There is also a lot of geometry. I will be getting into topics from the book in future posts.
https://mitpress.mit.edu/9780262548199/the-open-dynamics-of-braitenberg-vehicles/
This April 17 through 19 Barnes & Noble is offering Rewards and Premium Members 25% to 35% off on all pre-orders. A couple of their websites are here:
Jeff Yoshimi
boosted
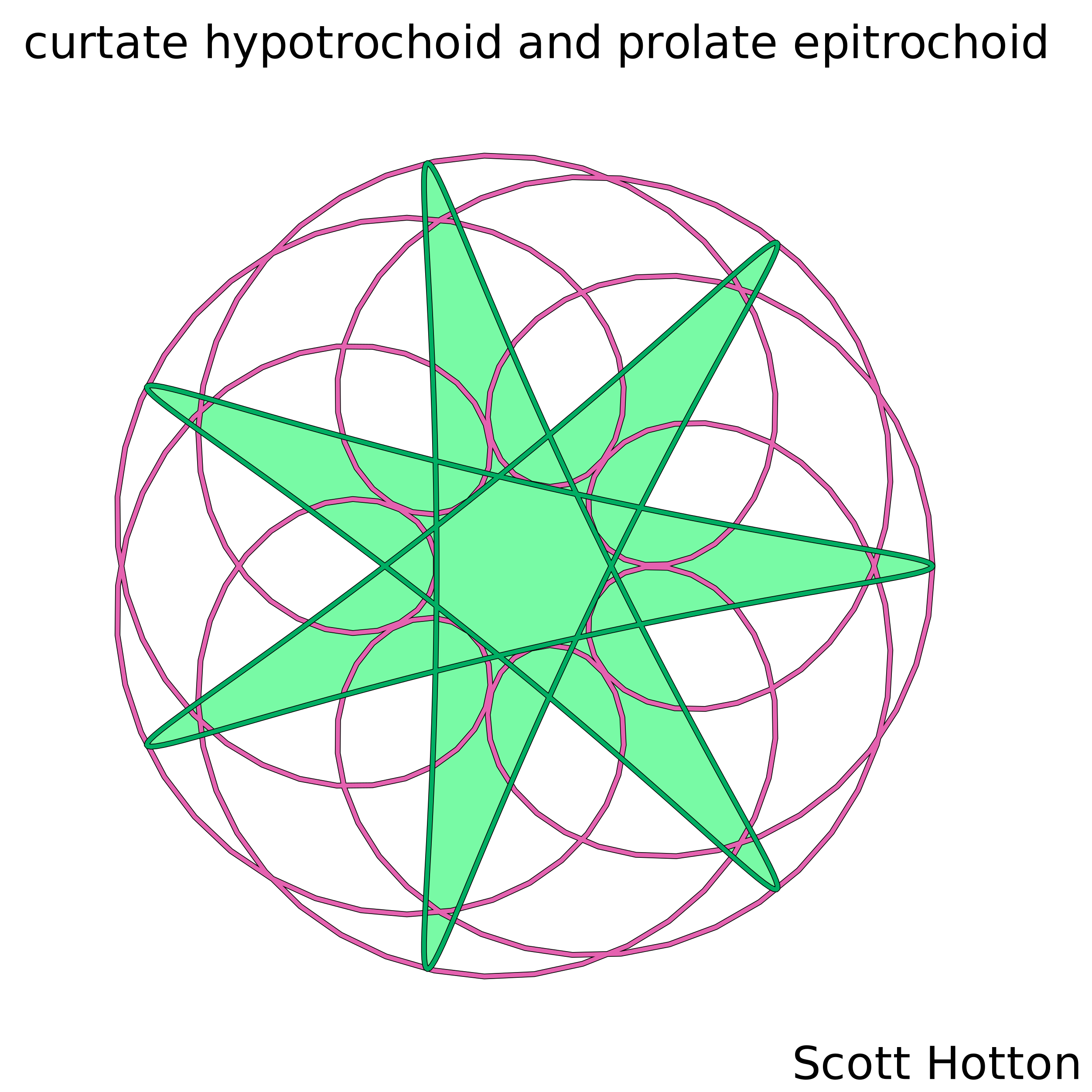
In addition to Bernoulli duality there are many interesting pairings that involve hypotrochoids and epitrochoids. The hypotrochoid here is the same as the earlier one with wheel ratio 3/7 and arm ratio 8/9. A collective term for hypotrochoids and epitrochoids is centered trochoids.
https://en.wikipedia.org/wiki/Centered_trochoid
The rolling disks of the centered trochoids here have the same center for all time. Instead of the arms being attached at their tracing points they are attached at the common center of the disks. The tracing points meet instantaneously at the points of extremal radius and the curves are tangent to each other at these points. As with Bernoulli duality the arms are collinear when the tracing points are at the points of extremal radius.
Both disks complete the same number of revolutions when the tracing points reach their starting position. During this time the rolling disk for the epitrochoid spins 10 times.
It looks as though the 7 loops of the epitrochoid meet tangentially but actually there is a tiny gap at these places.
Jeff Yoshimi
boosted

The joy of finding an amazing bookshop, spending hours browsing the shelves, discovering new books, carefully deciding which ones to take—and having the magic destroyed by someone yelling at you: “Who are you, and what are you doing in my house?”
Jeff Yoshimi
boosted

Evolution of Similarity-Biased Social Learning.
New preprint with Alejandro Perez Velilla. A long time in the making. Feedback welcome!
https://osf.io/preprints/socarxiv/j7yas
Jeff Yoshimi
boosted
The next two videos show just one of the agents' hypotrochoid-like paths. A combination of geometric and numerical methods can be used to illustrate how a mechanism a little more complicated than for a hypotrochoid can better approximate the hypotrochoid-like path. At each moment in time there are 12 points along the path that have been selected numerically so that they can be be partitioned into the vertices of nearly equilateral polygons in two ways.
An equilateral polygon is one whose edges all have the same length. A regular polygon is an equilateral polygon with the same angle at all of its vertices. An equilateral triangle is necessarily regular. In contrast there are infinitely many shapes a rhombus can have. They can be distinguished by the ratio in the lengths of their diagonals. A square is a rhombus whose diagonals have the same length.
The 12 chosen points can be partition into the vertices of 4 nearly equilateral triangles and into the vertices of 3 nearly equilateral quadrilaterals. The coefficient of variation for the edge lengths within each triangle and within each quadrilateral is, on average, about 6%. The triangles do not change shape very much from the small variation in their edge lengths. The variation in the shape of the quadrilaterals is more noticeable because the diagonals alternately expand and contract.
The change in shape of the path from a hypotrochoid to the Braitenberg path can be largely accommodated in the two polygon partitions by allowing the diagonals of the square to oscillate in length. This causes the speed of the vertices to vary more dramatically.
Jeff Yoshimi
boosted
Each quadrilateral acts like a 4 bar mechanical linkage. We can attach a vertex of a triangle to a vertex of a quadrilateral to build a larger linkage that can draw an approximation to the Braitenberg path. The two polygons counter rotate around their shared vertex.
In the video the polygon's shared vertex is colored red. Points have been chosen at each moment in time to approximate the centers of the polygons. These points along with the path's center have been colored cyan. At the beginning of the video the shared vertex is located at the point of maximal radius on the right side of the path. When the shared vertex returns to its initial position the center of the quadrilateral has wound around the center of the path 8 times and the common vertex has wound around the center of the quadrilateral 3 times. During this same time the center of the triangle has wound around the center of the path 3 times and the common vertex has wound around the center of the triangle 8 times.
When the shared vertex is at a point of extremal radius the 3 centers, and the shared vertex, are nearly collinear. When the shared vertex is at a point of maximal radius the triangle is inside the quadrilateral and when the shared vertex is at a point of minimal radius the triangle is outside of the quadrilateral. This is reminiscent of Bernoulli duality even though the paths made by the Braitenberg vehicles are the result of sensory feed back between the agents.
Jeff Yoshimi
boosted
This video shows again how the two construction methods together resembles a mechanical differential. Their wheel ratios are reciprocals. Once the tracing point returns to its initial position the larger rolling disk has revolved 8 times around the center of the hypotrochoid and spun 3 times around its own center. And during this same time the triangles have revolved 3 times around the center of the hypotrochoid and spun 8 times around its own center.
Jeff Yoshimi
boosted
The quadrilaterals' diagonals oscillate in a fairly precise fashion. The period of oscillation is the same for all 3 quadrilaterals but their phases are shifted. When the lengths of the diagonals of a quadrilateral have switched from their initial values the quadrilateral is nearly congruent to its initial shape. So it nearly returns to its initial shape twice during one period in its diagonals' oscillation.
In the video the quadrilaterals change color and pause each time they come close to returning to their initial shape. When the quadrilaterals reach their 1st return to their initial shape (about 2 seconds) they appear as if they had been simply rotated around the center of the path by 2/11 of a turn in the anticlockwise direction, but actually the vertices were cyclically permuted in the clockwise direction during the quadrilaterals' motion. When the quadrilaterals reach their 2nd return they appear as if they had completed 4/11 of a turn and their diagonals have returned to their initial lengths. The 4th time the quadrilaterals return to their initial shape they appear as if they had completed 8/11 of a turn with the vertices in the correct order. On the 11th return to their initial shape the quadrilaterals return to their initial positions, but with their vertices cyclically permuted. On the 44th return the vertices are back at their initial positions.
During the time it takes for the 12 vertices to return to their initial position there are 44 moments where the quadrilaterals look as if they were incrementally rotated by 2/11 of a turn. Altogether the quadrilaterals appear to have made 8 revolutions around the path's center even though their shapes were changing as they moved.
Jeff Yoshimi
boosted

It turns out tipping is customary on the Moon.
Jeff Yoshimi
boosted
The epitrochoid and peritrochoid construction methods taken together also resemble a kind of mechanical differential where one of the rolling wheels drives the other through the linkage made up of the two arms. As with hypotrochoids the turning ratio for an epitrochoid or peritrochoid is the number of times the rolling wheel revolves around the center of the fixed circle to the number of times the rolling disks spins around its center.
In this example once the tracing point has completed tracing over the entire curve the smaller rolling disk has revolved 3 times around the center of the fixed circle and spun 8 times around its own center. So its turning ratio is 3/8. At the same time the larger rolling disk has revolved 8 times around the center of the fixed circle and spun 3 times around its own center. So its turning ratio is 8/3. As with hypotrochoids the arm ratios and turning ratios for the two construction methods are reciprocals.
Jeff Yoshimi
boosted
This video shows the two construction methods together. Again the two construction methods together resemble a kind of mechanical differential where one of the rolling wheels drives the other through the linkage made up of the two arms. The turning ratios are the same as before. Once the tracing point has completed tracing over the entire hypotrochoid the smaller rolling disk has revolved 3 times around the center of the hypotrochoid and spun 4 times around its center. So its turning ratio is 3/4. At the same time the larger rolling disk has revolved 4 times around the center of the hypotrochoid and spun 3 times around its center. So its turning ratio is 4/3.
Jeff Yoshimi
boosted
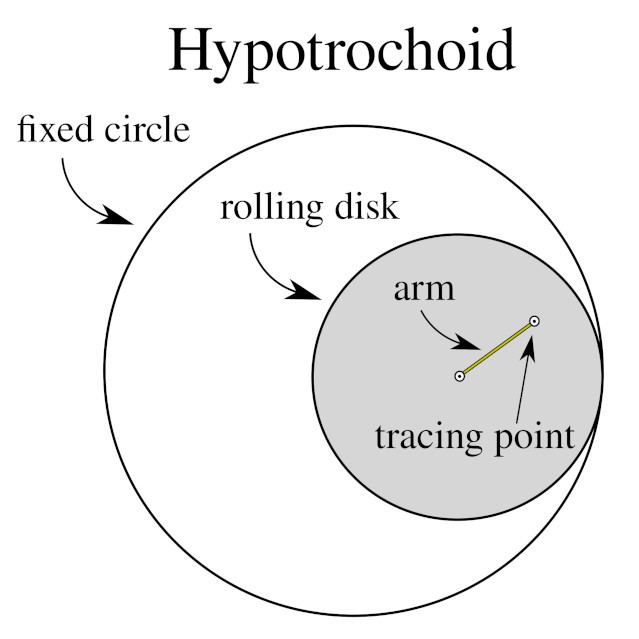
Here is an example of a hypotrochoid to illustrate Bernoulli's double generation theorem. It shows how the same hypotrochoid can be generated in two different ways.
A hypotrochoid can be constructed by rolling a disk along the inside of a larger circle as shown in the attached picture and in the first video. The rolling disk is shown in gray. The gold colored line segment inside of the rolling disk is called the arm. We think of the arm as being attached to the rolling disk. One of its end points is positioned at the center of the rolling disk. It traces out a circle called the deferent (not shown). As the disk rolls the other end point of the arm traces out the hypotrochoid shown in sea green.
There are two numbers that are often used to characterize a hypotrochoid. They are the wheel ratio and the arm ratio. The wheel ratio is the ratio of the radius of the rolling disk to the radius of the fixed circle. The arm ratio is the ratio of the arm's length to the rolling disk's radius. Two hypotrochoids with the same wheel ratio and arm ratio are geometrically similar.
Hypotrochoids are often divided into three classes based on their arm ratios. If the arm ratio is less than 1 then the tracing point is in the interior of the rolling disk. If the arm ratio is 1 then the tracing point is on the circumference of the rolling disk. If the arm ratio is greater than 1 then the tracing point is outside of the rolling disk. A hypotrochoid with an arm ratio less than 1 is called a curtate hypotrochoid. A hypotrochoid with an arm ratio equal to 1 is called a hypocycloid. A hypotrochoid with an arm ratio greater than 1 is called a prolate hypotrochoid.
I set the enrollment cap for my phenomenology course a bit high in Spring, and now I need to fill those seats, so I made this poster....
Jeff Yoshimi
boosted

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Wow, PLoS' first logo, from the year 2000!
In 2005, I joined the advisory board PLOS ONE and it started publishing in 2006. #scientificPublishing #openaccess
{kind=link}
Philosopher, phenomenologist, and cognitive scientist at UCMerced. Visualization builder. Work on Simbrain (http://simbrain.net) in my free time.
Joined Dec 2022
