
#cnc #чпу #? @rf @ru@lor.sh
Почему ни один обоссанный интерпретатор гкода не умеет ограничивать ускорение линейной функцией от текущей скорости?
Это же универсальное свойство шаговиков. У линейных осей робота, движимых электромоторами, ускорение пропорционально моменту, момент пропорционален току через обмотки электромоторов, ток пропорционален разности напряжения питания и противо-ЭДС мотора, противо-ЭДС мотора пропорциональна скорости его вращения. Если ограничивать движение максимальной скоростью и максимальным ускорением, как это в klipper сделано например, вместо функции от скорости, проёбываешь и более высокое возможное ускорение на низких скоростях, и более высокую возможную максимальную скорость при длительных перемещениях.

@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Оператор тут при том, что он будет это настраивать. У тебя предельное ускорение, раз уж ты на этом выигрывать решил, зависит от массы заготовки и оснастки, которые эти шаговики будут тягать.
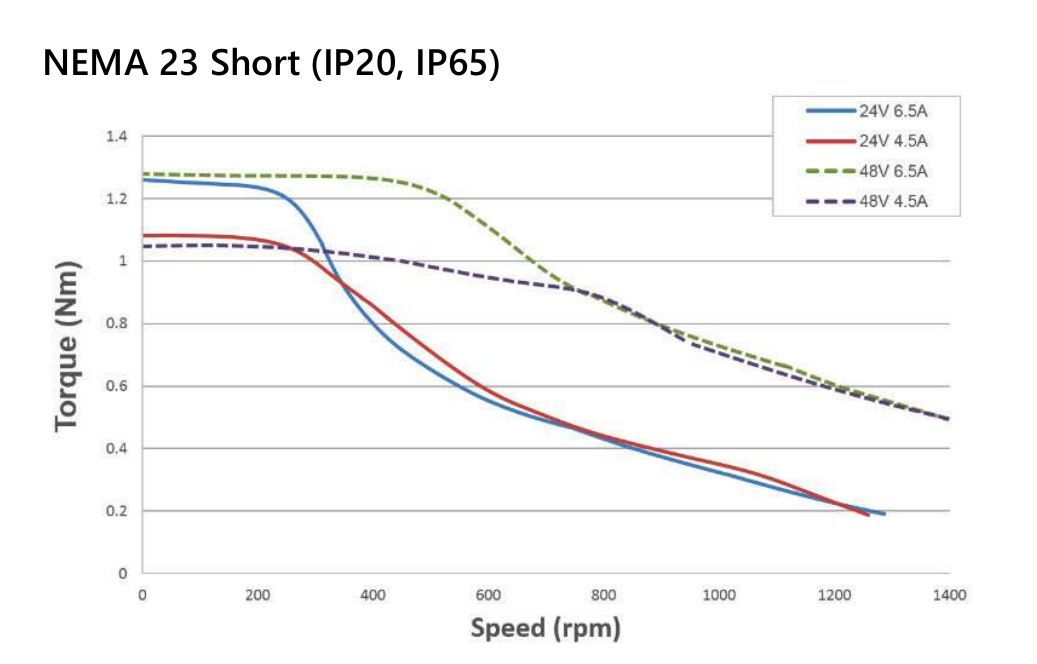
@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Посмотрел даташиты на шаговики, и понял, что всё не так однозначно просто. В основном рисуют кривую момента в виде куска постоянного момента, а потом снижения его обратно пропорционально скорости.
Драйверы шаговиков же умеют же питать движки не только постоянным напряжением, но и постоянныим током. И именно в режиме постоянного тока работают на низких скоростях.
Возможности шаговиков ограничены не напряжением питания (его можно сделать любым), а мощностью. Коммерческие интерпретаторы вроде бы умеют это учитывать.
@vovanium Покажи мне драйвер шаговиков, который может питать шаговики любым напряжением, а не лишь напряжением питания как максимумом возможного напряжения на шаговике (и как правило серьёзно ограниченном). У меня вот довольно понтовый TMC2660, который максимум 30В может, я на него подаю 28.5, и мне мало скорости. Прикажешь менять шаговики на другие, чтобы было мало момента?
@rf @ru@lor.sh
@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Драйверы используют ШИМ для регулирования тока. Даже в TMC2660 это есть.
Если ты хочешь использовать на полную, тебе придётся кривую скорость-момент шаговика в ЧПУ-контроллер забивать, она не линейная ни разу.
@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh типичная кривая шаговика:
@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Это из даташита на мотор https://stxim.com/wp-content/uploads/2020/07/18-2.pdf
Как они их получили, известно только им самим. Но вообще от формы импульсов ШИМ момент может немного зависеть.

{kind=link}
@L29Ah @rf @ru ты же сам можешь изменять что тебе нужно - https://linuxcnc.org/docs/2.7/html/remap/remap.html вот тебе ось вместе интерпретатором ГЫ-кодов бери и меняй лол если ты говоришь про какой-то твой станок дома который стоит ты вправе переделать схему вместе с чипом на нем скомпилить вот эту срань и переписать ограничения ускорения линейной функции от тек скорости.
Просто понять пытаюсь кто именно должен для тебя поменять что-то в интерпретаторе?....

@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Может, потому что никому нахер не нужно, потому что выигрыш мизерный, причём ценой времени оператора.
А может, потому что не умеют нормально в матан.
Я так понимаю, это надо только при быстрых перемещениях, а на тех станках, где это занимает большую часть времени и нужна производительность, это решено кардинально — введением обратной связи.