
#cnc #чпу #? @rf @ru@lor.sh
Почему ни один обоссанный интерпретатор гкода не умеет ограничивать ускорение линейной функцией от текущей скорости?
Это же универсальное свойство шаговиков. У линейных осей робота, движимых электромоторами, ускорение пропорционально моменту, момент пропорционален току через обмотки электромоторов, ток пропорционален разности напряжения питания и противо-ЭДС мотора, противо-ЭДС мотора пропорциональна скорости его вращения. Если ограничивать движение максимальной скоростью и максимальным ускорением, как это в klipper сделано например, вместо функции от скорости, проёбываешь и более высокое возможное ускорение на низких скоростях, и более высокую возможную максимальную скорость при длительных перемещениях.

@vovanium Покажи мне драйвер шаговиков, который может питать шаговики любым напряжением, а не лишь напряжением питания как максимумом возможного напряжения на шаговике (и как правило серьёзно ограниченном). У меня вот довольно понтовый TMC2660, который максимум 30В может, я на него подаю 28.5, и мне мало скорости. Прикажешь менять шаговики на другие, чтобы было мало момента?
@rf @ru@lor.sh
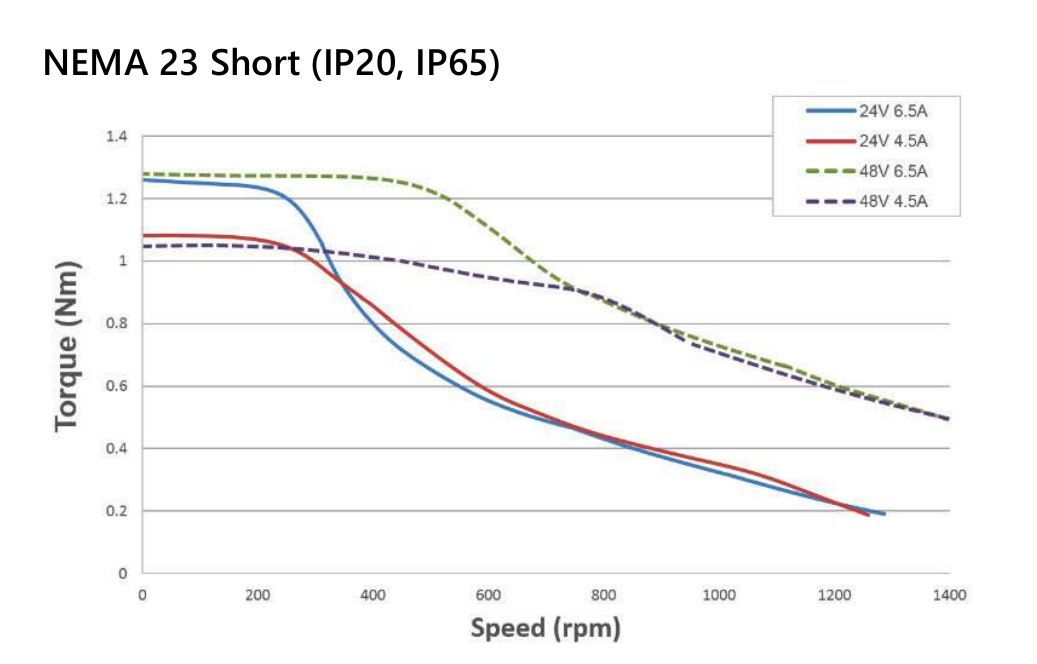
@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh типичная кривая шаговика:
{kind=link}
@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Это из даташита на мотор https://stxim.com/wp-content/uploads/2020/07/18-2.pdf
Как они их получили, известно только им самим. Но вообще от формы импульсов ШИМ момент может немного зависеть.

@L29Ah@qoto.org @rf@mastodon.ml @ru@lor.sh Драйверы используют ШИМ для регулирования тока. Даже в TMC2660 это есть.
Если ты хочешь использовать на полную, тебе придётся кривую скорость-момент шаговика в ЧПУ-контроллер забивать, она не линейная ни разу.